Abstract
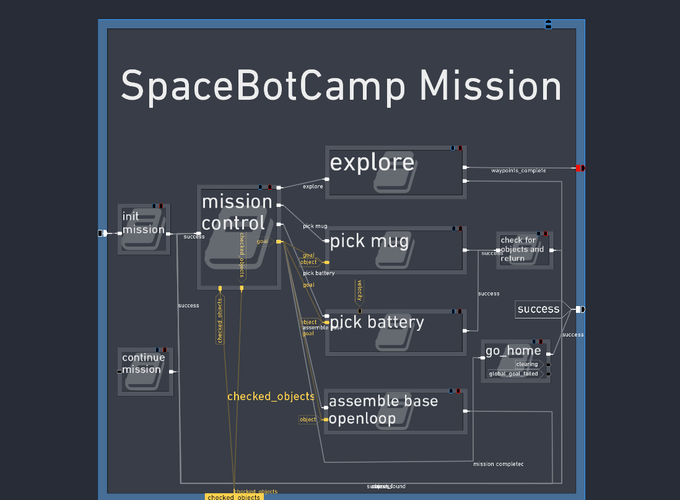
Robotic tasks are becoming increasingly complex, and with this also the robotic systems. This requires new tools to manage this complexity and to orchestrate the systems to fulfill demanding autonomous tasks. For this purpose, we developed a new graphical tool targeting at the creation and execution of robotic tasks, called RAFCON. These tasks are described in hierarchical state machines supporting concurrency. A formal notation of this concept is given. The tool provides many debugging mechanisms and a GUI with a graphical editor, allowing for intuitive visual programming and fast prototyping. The application of RAFCON for an autonomous mobile robot in the SpaceBotCamp competition has already proved to be successful.
Sebastian Brunner
Senior Software Engineer, Robotics
My research interests include robotics, AI, and autonomous system architectures.