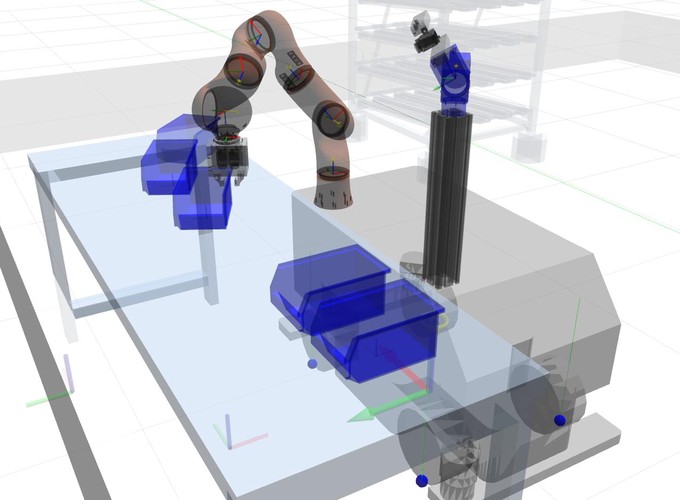
Our AIMM robot was simulated using the Gazebo Framework and the ROS middleware. The robot’s 12 DOFs were simulated using Gazebo’s controller suite. On top of that, path planning, object detection, navigation, world model, and task control (RAFCON) modules were integrated. The simulation was used for industrial and domestic service scenarios (among others for the EASE project).
My responsibilities: Full Stack Component Integration, Controller Configuration, Autonomous Task Control, Task Execution Logging and Profiling, Semantic World Modeling
