Abstract
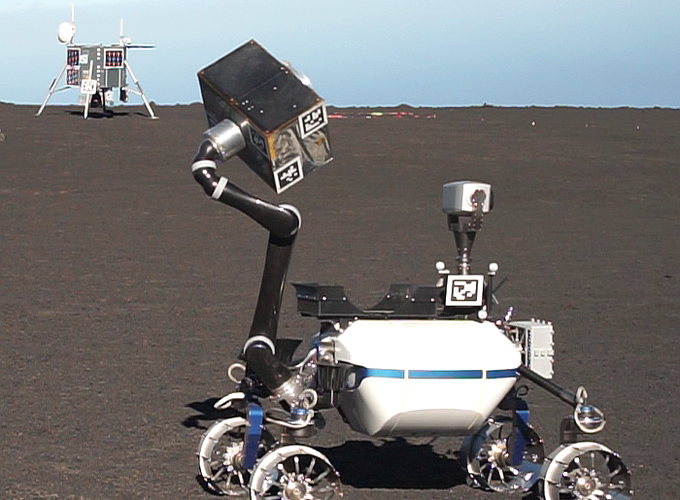
Robotic systems map unknown terrain and collect scientific relevant data of foreign planets. Currently, pilots from Earth steer these rovers on Moon and Mars surfaces via teleoperation. However, remote control suffers from a high delay of the long distance communication which leads to a reduction of the time the rover can spent gathering scientific data. We propose a system architecture for an autonomous rover for planetary exploration. The architecture is centered around a flexible, scalable world model to record and represent the environment of the robot. An autonomous task control framework and a versatile constraint motion planner use the live information from the world model to steer the rover through complex manipulation tasks. Furthermore, we present the enhancement of our Light Weight Rover Unit (LRU) with an innovative docking interface for arbitrary tool handling. We showcase the effectiveness of our approach at the moon-analogue demonstration mission of the ROBEX project on Mt. Etna, Sicily. We show in two experiments that the robot is capable of autonomously deploying scientific instruments and collecting soil samples from the volcano’s surface.