Design, Execution, and Post-Mortem Analysis of Prolonged Autonomous Robot Operations
Abstract
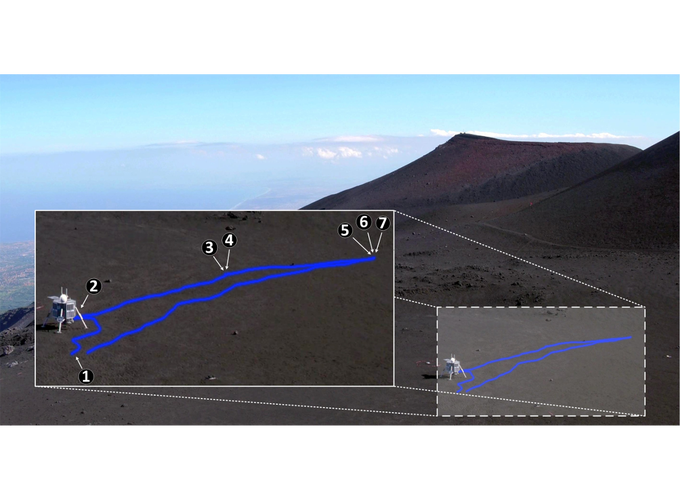
In the context of space missions and terrestrial applications, both mission goals and task implementations for autonomous robots are becoming increasingly complex. Thus, the challenge of monitoring the achievement of task objectives and checking the correctness of their implementation is becoming more and more difficult. To tackle these problems, we propose an unified architecture that supports different stakeholders during the different phases of the deployment. 1) the design phase; 2) the runtime phase; 3) the post-mortem analysis phase. Furthermore, we implement this architecture by enhancing our task programming framework RAFCON with powerful logging, debugging and profiling capabilities. We demonstrate the efficiency of our approach in the context of the ROBEX mission, during which the DLR Lightweight Rover Unit autonomously deployed several seismometers in an unknown rough terrain on Mt. Etna, Sicily. The analysis results for a state machine consisting of more than 1500 states and more than 1900 transitions are presented. Finally, we give a comparison between our framework and related software tools.
Sebastian Brunner
Senior Software Engineer, Robotics
My research interests include robotics, AI, and autonomous system architectures.